A Novel Active Space Debris Removal Mechanism
Collaborative project with Texas A&M Land, Air, and Space Robotics (LASR) Laboratory
Sponsor: Technology Service Corporation, AFRL
The topic of Active Debris Removal (ADR) has gained significant attention over the past few decades. As the number of objects in Low Earth Orbit (LEO) increases from year to year, we come closer and closer to the “Kessler Syndrome” first described by Kessler and Cour-Palais in 1978, leading to a point of no return in which the number of debris objects created from collisions will exceed the number of objects decaying, eventually rendering LEO unusable.
While various researchers have focused on ADR techniques to plan trajectories to pick debris objects, a detailed concept of operations on how to deorbit large bodies is a topic of research. As a part of discussions involving partners from industry, and academe, it was opined that the most efficient way to mitigate large debris objects is to accelerate their natural drag forces by augmenting them with devices. To this end, in collaboration with Texas A&M Land Air Space Robotics (LASR) Laboratory a representative concept of operations (CONOPS) was developed for proximity operations with rocket bodies, in order to deploy the drag enhancement device from a modestly small spacecraft bus. The goal is to instrument the small spacecraft with multiple packages, and equip several rocket bodies with drag enhancement devices, as a part of the same mission.
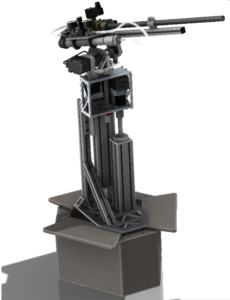
Rendering of the AHAB system mounted on a HOMER robotic platform
To test the guidance, navigation and control approach for ADR at a small scale, a unique hardware testbed was designed and developed at LASR Lab. This is known as the Navigation, Estimation, Sensing and Tracking (NEST) testbed. It consists of a 3U style battery powered hardware testbed that has the ability to house a variety of representative sensor systems for spacecraft proximity operations, with special emphasis on terrain relative navigation and planetary landing. The main component of the sensor suite developed used for the ADR capture experiments is the camera system. The 1300 CMOS imager provides 1.3 MB images of the rocket body, with sufficient resolution to identify features being detected and tracked by the emulation experiment. The camera alone can be used to identify the known rocket nozzle shape and use its identified image to model the rotation rate of the body and predict the future time at which it aligns with the barrel of the air cannon (AHAB-AC).
The testbed was used to demonstrate the ability of AHAB to reliably and accurately shoot the harpoon through the nozzle of the Suspended Target Emulation Platform (STEP) rotating (flat spin) at different rates.