Dynamics and Control of Hummingbird Inspired Aerial Robots
Sponsor: National Science Foundation
The goal of this project is to improve our understanding of the dynamics and control of bio-inspired flight, which will enable the development of the next generation of miniature flying robots with robustness and agility comparable to natural flyers. The research objective is to improve our understanding of flight dynamics, maneuverability (or controllability) and disturbance rejection capabilities of realistic hummingbird-like flapping-wing robots through fully nonlinear simulations and flight experiments using a robotic hummingbird developed at AVFL.
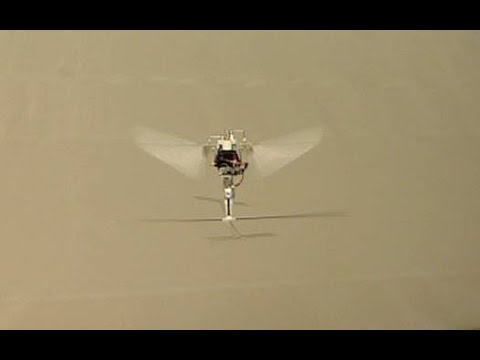
We have developed a fully nonlinear 6-DOF flight dynamics model of a hummingbird-like flapping-wing robot with flexible wings by coupling rigid-body equations of motion with a CFD/CSD-based high fidelity wing aeroelastic model. We have also developed a 62-gram biomimetic robotic hummingbird that utilizes aeroelastically tailored wings flapping at 22 Hz with biologically inspired wing kinematic modulation strategies for active stability and control and closed-loop control laws implemented on a custom-built 1.7-gram autopilot. By tilting the flapping planes, varying the relative wing flapping amplitude, and shifting the mean position of the flapping stroke, the robotic hummingbird is able to modulate the magnitude, direction, and location of the lift vector of each of the wings in the same way that hummingbirds do to maneuver and stabilize themselves. This is the first ever study where the exact kinematic control strategies used by real hummingbirds and two-winged insects are implemented on a robotic flyer and investigated through free-flight testing.


Students: David Coleman, Xuan Yang