A Novel Amphibious Platform with Stowable Cycloidal Propellers
Sponsor: Office of Naval Research
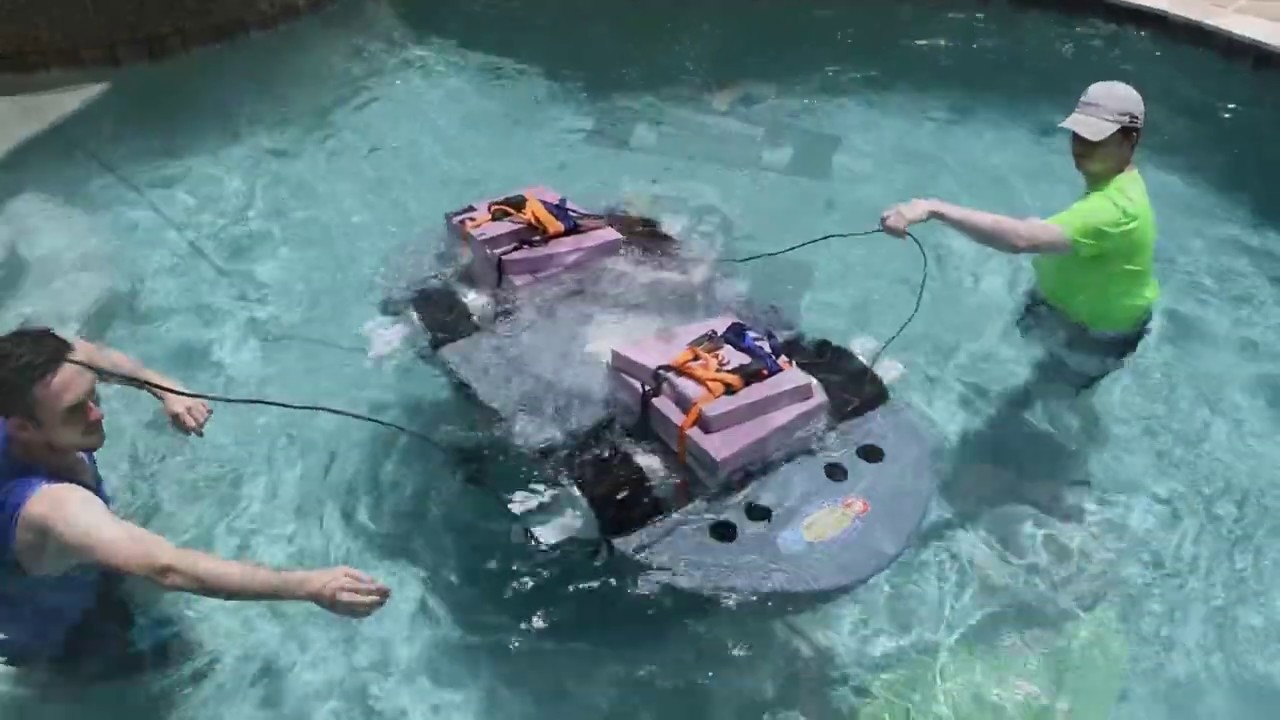
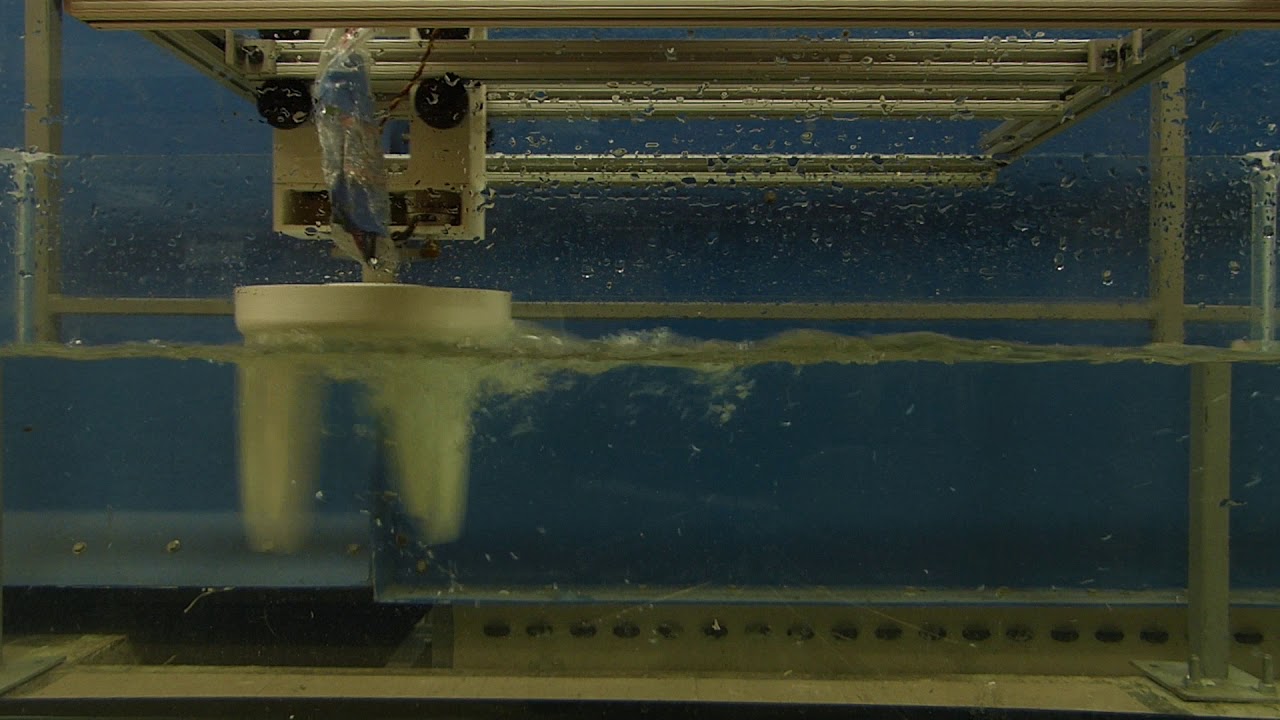


The objective of this project is to develop a revolutionary amphibious (underwater/ground) platform with (1) multiple cycloidal propellers capable of 360° of instantaneous thrust vectoring using cyclic blade pitch control for superior station keeping and maneuvering across the spectrum of low to high speeds underwater, (2) the ability to easily retract the cycloidal propellers and stow them inside the rims of the specially designed wheels during ground locomotion, (3) single transmission to drive both the propeller and the wheel with a simple clutch to disengage wheel while under water, (4) a ballast system for buoyancy control and center of gravity adjustment (both longitudinal and lateral), and (5) individual speed control for propellers/wheels, a steering mechanism, and/or tank treads for improved mobility in water and on the beach. In the ground mode, the vehicle could turn either by steering front/rear wheels or differential rotational speed of the left and right treads/wheels. The vehicle is designed to be symmetric about a horizontal mid-plane to enable operation even if the vehicle is upside down when washed on the beach. A 350-pound prototype has been built and tested at the towing tank facility at the University of Michigan.
Students: Sean McHugh, Chase Wiley, Ramsay Ramsey, Adam Kellen